Goroutine的调度模型
Goroutine
Goroutine是一个与其他 goroutines 并行运行在同一地址空间的Go函数或者方法,一个运行的Go程序由一个或多个goroutines组成。
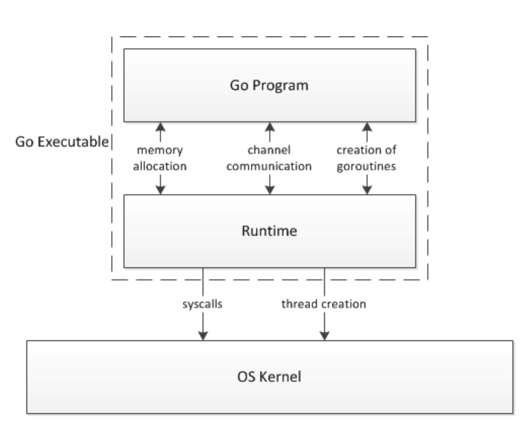
Go程序在执行时实际上是通过Go的runtime与操作系统内核进行交互。Go程序中创建的goroutines、内存对象等都是交由runtime去管理的,如下图:
Goroutine和Thread的区别
内存占用不同
创建一个goroutine的栈的大小,在 go1.4 版本以后是 2KB,运行过程中如果栈不够再进行扩容(这部分内容可以查看Go的内存管理这篇文章)。
而一个标准的POSIX线程的创建,默认都会比较大(1 ~ 8MB栈内存),而且还需要一个称为 “guard page” 的内存空间用于隔离不同的线程栈空间。而且线程的栈空间一旦创建完成就不能变化,会有 ”溢栈“ 的风险。
创建销毁的开销不同
POSIX线程都是内核级别的交互,创建和销毁的开销都较大。
而goroutine是完全用户态的,交由runtime去维护,创建和销毁的开销都非常小,基本上平时写程序都是随意创建。
调度切换
线程与线程的切换,不考虑陷入内核的话,平均会消耗1000到1500纳秒(主要是因为上下文保存的成本高,较多寄存器,还有很多公平性要保证,和复杂的时间计算统计)。
而goroutine的切换,平均约为200纳秒(纯用户态切换,只有3个寄存器),并且还没有陷入内核的问题,切换成本要大大低于线程的切换。
复杂性
多线程之间通讯,要通过共享空间,多个线程访问同一块内存空间,由于数据竞争,就要加锁,开销就比较大。并且线程也是不能无限制的去创建的。如果使用多路复用,就要有大量的callback,代码的可读性也会较差。
Goroutine之间通讯可以通过channel,性能就好的多。并且goroutine的阻塞,并不会导致内核的线程阻塞,runtime会换其他的goroutine到这个线程执行,所以多核CPU的利用率很高。
Goroutine的M:N模型
Go程序在运行时,runtime会创建多个内核线程,之后我们创建的goroutines都会经过runtime调度到这些内核线程中执行,goroutine由于非常轻量,所以可以创建大量的goroutines,然后分配到runtime创建的几个内核线程中,多个goroutines之间可能是并发(由一个内核线程执行),也可能是并行(分配到了不同的线程执行)。Goroutines的数量一般都会远大于线程数,所以也叫做 M:N 模型。
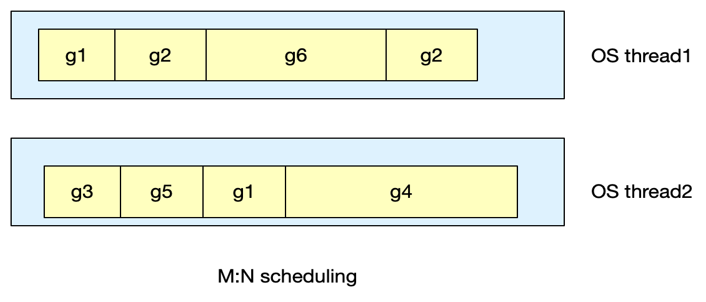
如上图,g1等就是goroutine,这些goroutines被分配到了多个内核线程中去执行。
GMP模型
GM调度器模型
G,就是Goroutine的缩写,每次我们go func()时都会创建一个G,它的底层是runtime.g的结构体,包含了当前goroutine的状态、堆栈等上下文信息。
M,就是工作线程,Machine的缩写,底层是runtime.m结构体。所有的M都是有线程栈的。如果不对线程栈提供内存的话,系统会给该线程栈提供内存(不同操作系统的默认线程栈大小不同),如果指定了线程栈,则在M执行G时,会将M的stack指向G的stack,M的PC寄存器指向G的PC寄存器。
GM调度器模型是在Go1.2之前的goroutine调度模型,它的执行过程如下图:
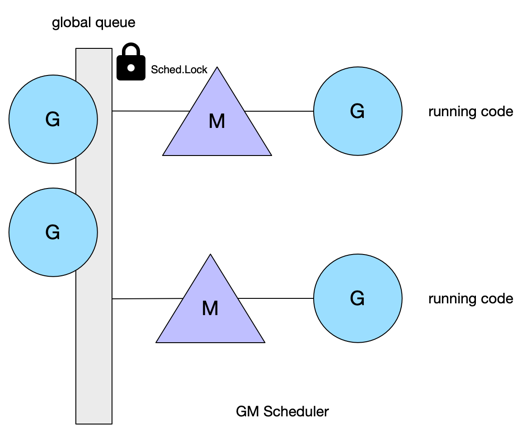
首先会有一个全局队列,里面挂着一些待运行的G,由于是队列是全局的,所以要访问就需要加锁。然后多个M会从全局队列中获取G然后运行。
当一个G由于系统调用被阻塞,运行这个G的M就也会被阻塞,这是就需要再创建/唤醒一个新的M来运行其他没有阻塞的G,M可以按照需要不停的创建,而活跃的M个数(处于非阻塞)要求小于系统变量 GOMAXPROCS。
GM模型的问题
单一全局互斥锁:即全局队列的那把大锁,会导致所有对队列中G的操作都要加锁,效率很低。
G的传递问题:当正在M中运行的一个G,它的代码里又创建了一个G(goroutine里创建goroutine),这个G依然会被放在全局队列中等待调度,这就导致调度的延迟增大以及额外的性能开销(直接在本地M上执行不就好了)。
每个M都持有内存缓存:每个M都会有自己的内存缓存mcache(mcache相关内容可以查看golang的内存分配这篇文章),而只有M在运行G时会使用到这个内存缓存,当M处于系统调用时并不需要,而我们实际开发中,处于系统调用阻塞的线程,和在运行的线程比例高达100:1,即大部分时候M的内存缓存都是不需要的,造成了很大内存浪费。同时M缓存的内存亲缘性也比较差,比如当一个G在M上跑了一会然后进行系统调用阻塞住,这个G就会从M上摘下来挂到全局队列中,等这个G的系统调用执行完,就可能分配到其他的M上,导致这个M的缓存中存储的这个G的上下文就浪费了。
严重的M阻塞/解锁:在大量G系统调用的情况下,M会被经常的阻塞和唤醒,这增加了很多开销。
由于上述的GM模型限制了Go并发程序的伸缩性,尤其是那些高吞吐或者并行计算要求高(系统调用多)的程序。于是就产生了新的GMP模型。
GMP调度器模型
P:Processor的缩写,是一个抽象的概念,并不是真的物理处理器。P实际上代表了M所需要的上下文环境,它负责衔接M和G的调度。P可以理解为一个队列,它里面会存着一些待运行的G(即有两种队列,全局队列和每个P的队列),当P中有G需要运行时,就需要创建或者唤醒一个M来执行它的G。P的数量可以通过 GOMAXPROCS 这个变量来设定,在 go1.5 之后默认是机器的核数,之前是1。
由于P的引入,上面说的M的内存缓存就移动到了P中,整个调度就变成了下图这样:
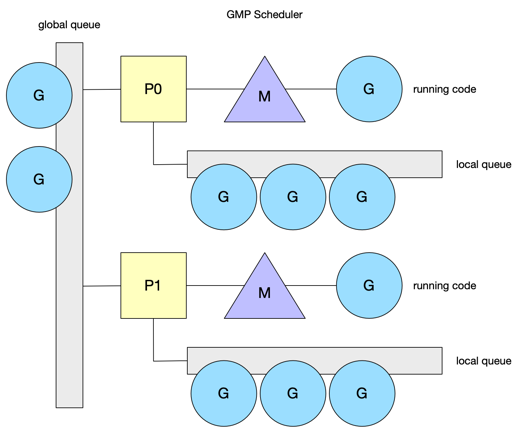
每个M都需要绑定P才能执行G,每个M可能会在自己绑定的P的队列,或者其他P的队列,或者是全局队列中找到G来执行。
P的队列,还是可能会被自己的M或者其他的M的并发访问,它使用了LockFree的算法实现原子操作来避免加锁,从而提升性能。
工作窃取
每个M都是运行自己P中的G,当自己P中没有待运行的G了,就会先去全局队列中找找(全局队列的访问是要加锁的),然后捞到自己的P中,如果全局队列中也没有G了,就会从其他P中 “偷” 一些G到自己这里,这就是 Work-Stealing 算法。
系统调用
当一个G进行系统调用时,M和G都会进入阻塞,而此时P的状态会变成 syscall,意味着这个P的G正处在系统调用中,此时这个P是不能立刻调度给其他的M的,如果在短时间系统调用就能结束,M被唤醒,那么M还会优先获取这个 syscall 状态的P,这样有利于数据的局部性。
当这个系统调用持续时间太长,导致P中后续的G无法被执行,此时这个P就会跟M彻底解绑。runtime会有一个特殊的G叫做 sysmon,他也会绑定一个M去执行,sysmon 会定时去扫描,执行syscall的G如果超过了一个system tick(10ms),就会把它对应的P设为idle(空闲的意思),放到一个idle的P队列中,等待被其他M绑定,那么P中剩下的G就可以被其他M执行了。
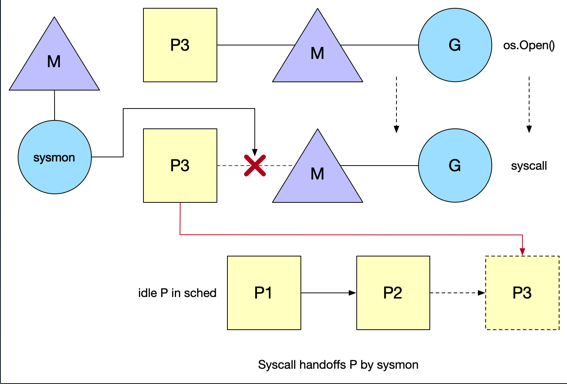
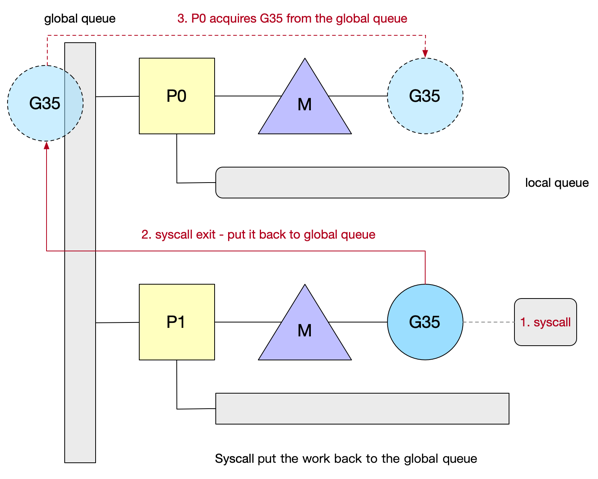
在这个G的系统调用结束后,这个M还是会优先尝试获取原来的P,执行P中剩余的G,如果P已经解绑并挂到了idle列表,则这个M会去idle列表中尝试绑定其他的P。如果idle列表中也没有P的话,则会把刚刚解阻塞的G放回到全局队列中,如下图:
创建新的M
当由于系统调用导致需要将P放到idle列表等待绑定到其他的M上时,如果有正在寻找P的M则可以完成绑定,如果没有,则需要创建一个新的M,这种情况下,Go是无法限制M的数量的。所以写程序时要注意,如果有大量的goroutine都会陷入到系统调用中时,可能会因为创建大量的M导致OOM。
线程自旋
两种情况会导致M自旋的产生:
-
没有P的M找P绑定
-
P中没有G的M找G运行
以上两种情况时,M会进行自旋,就是循环执行一个逻辑,比如循环去检查idle列表去找P,自旋的好处就是如果很快就有可用的P,可以快速的完成绑定,不需要M进行休眠和唤醒导致的开销,降低了上下文的切换,坏处也很明显,如果迟迟自旋都没有结果,CPU就会白白浪费在这无意义的轮询中。
所以Go中最多只能保持 GOMAXPROCS 个M进行自旋。同时如果类型1导致的自旋存在时,类型2的自旋就不能停止,因为一旦停止,自己的P就可能解绑,导致P被类型1的那个M抢走。
在新的G被创建,M进入系统调用,M从空闲被唤醒这三种状态变化前,调度器会确保至少有一个自旋的M存在,除非没有空闲的P:
- 对于新的G被创建时,需要保留一个处于类型2自旋的M,这样这个G就可以很快被运行。
- 当M进入系统调用时,他的P就会解绑放到idle列表中等着被其他M绑定,这时保持一个类型1自旋的M,就可以让这个P尽快的绑定到M。
- M从空闲变为活跃,意味着可能一个处于自旋的M进入了工作状态,这时要检查并确保还有一个M在自旋,防止还有上述的两种情况存在。
GMP模型对GM模型三个问题的解决
单一全局互斥锁
G被划分到了多个P和全局队列中,全局队列的访问依然是要获取锁,但是使用的场景明显变少了,大部分都是从P中获取G,且多个M窃取P中的G时,对P的访问是LockFree的原子操作,不需要加锁。
G的传递问题
G中创建新G时,新的G就保存在同一个P中,而同一个P是和同一个M绑定的(在不产生长时间的系统调用时),所以G和M的亲缘性也可以保证,同时G的上下文是在P中保存的,数据的局部性也很好。
每个M都持有内存缓存
内存缓存被放到了P中,而P的个数是固定的,远小于M的数量,所以不会有过多的消耗
严重的M阻塞/解锁
通过引入M的自旋,保证任何时候都有处于自旋状态的M,避免在等待可用P和G时,发生M的频繁阻塞和唤醒。
Sysmon
Sysmon 也叫监控线程,它无需P,直接和M绑定,是一个死循环,每20微秒到10毫秒循环一次,循环完一次就睡一会。如果每次循环时都没干什么事,睡的时间就会长点,减少CPU的浪费。
Sysmon 会做以下几件事:
- 释放限制5分钟的 span 物理内存
- 如果超过2分钟没有垃圾回收,就强制触发一次垃圾回收
- 长时间未处理的 netpoll 添加到全局队列
- 向长时间运行的G任务发出抢占调度
- 解绑因 syscall 长时间阻塞的P
Network poller
Go的所有I/O都是阻塞的,然后通过goroutine和channel来处理并发,因为所有I/O逻辑都是同步的,不需要回调,不需要Feature等数据结构,代码的可读性非常好。
G发起网络I/O被阻塞时,并不会导致M被阻塞,从而不会导致大量的M被创建,将异步I/O转换为阻塞I/O的部分成为 netpoller 。因此,有序G由于网络I/O阻塞后,恢复阻塞时,需要等待M和P的调度才能继续执行,所以可能会某些时候导致网络延迟变高,这也是目前Go的一个缺陷。
Network poller被调度回来的时机
由于网络I/O导致阻塞的G,在解阻塞时,会在三个场景下被调度回来:
- sysmon的发现,如上所说
- schedule函数的调用,就是M的P中没有G找G的函数
- GC:每次GC结束start the world时
Go程序的启动
首先会创建一个m0和g0,m0就是程序的主线程,g0负责管理和调度goroutine,就是schedule()函数。schedule()函数的作用是帮助P中没有G的M寻找可执行的G。
然后创建 GOMAXPROCS 个P,绑定m0和g0,所有P都存储在idle列表中,等待被M绑定。
新建任务g到p0的队列,m0的g0会创建一个指向runtime.main()函数的G,并放到p0的本地队列中。runtime.main()函数会启动sysmon线程,启动GC协程,执行代码中的所有init函数,最后执行程序的main()函数。
准备运行的新G将唤醒P,这个P会创建一个和自己绑定的M绑定到一个内核线程中。
特殊的g0
每次启动一个M,都会创建出一个g0,即每个M都有自己的g0,g0也是 runtime.m 结构体的第一个成员。g0的作用就是给这个M切换不同的G运行。
g0基于两种断点会将G调度到M上:
- 当G阻塞时,由于系统调用、互斥锁、或者chan阻塞,阻塞的G会进入睡眠模式,并允许Go安排和运行等待其他的G。
- 在函数调用期间,如果G必须要拓展它的堆栈,这个断点允许Go运行其他的G避免由于这个G导致CPU被占用。
在以上两种情况下g0会将当前运行的G替换为另一个G,然后选择的G替换g0在线程上运行。G的创建,也是g0完成的。并且与常规的G不同,g0有一个固定大小且比 2KB 更大的栈空间。
除此以外,g0还要处理以下事情:
- defer函数的分配
- GC收集,比如STW,扫描G的堆栈和标记,清除操作
- 栈扩容,当需要的时候由g0进行扩栈操作
Goroutine的总体调度过程
M首先从本地的P中拿G,没有就去全局队列里拿一半的G放到自己的P中,没有就从 netpoller 取出一些G并放到全局队列,还没有就随机选择一个P,从别的P中抢一半过来。
同时每个P每61次都会从全局队列中取一个G放到自己的队列中,防止全局队列的G饿死。